Оборонная промышленность
В современной боевой обстановке успех зависит не только от огневой мощи, но и от точности наведения, устойчивости систем и способности противостоять угрозам.

военный блок инерциальной навигации (Military Grade INS)
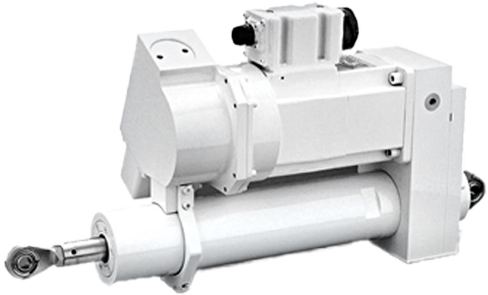
управление вектором тяги или рулями (TVC / Canard Actuation)

головка самонаведения (Seeker Head)

взрыватель и датчики ускорения/удара
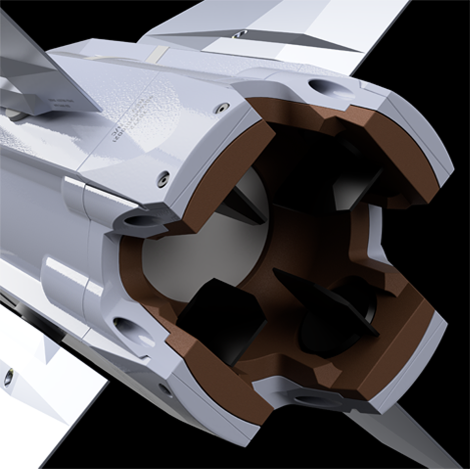
Умные ракеты

стабилизация вооружения (Weapon Stabilization System)

наземная инерциальная навигация (Land Based INS)
управление башней (Turret Control System)
Танки и бронетранспортёры
Оборонная промышленность
В современной боевой обстановке успех зависит не только от огневой мощи, но и от точности наведения, устойчивости систем и способности противостоять угрозам.

Состоит из ИМУ с волоконно оптическими гироскопами (FOG) или гироскопами с лазерным кольцом (RLG) с угловой точностью менее 0,001°/ч, кварцевыми или MEMS акселерометрами военного класса с низким
уровнем шума, трёхосным магнитометром для коррекции курса, барометрическим датчиком давления для коррекции высоты и навигационного контроллера с алгоритмами расширенного фильтра Калмана. Калибровка гироскопов проводится на трёхосном стенде
с точностью менее ±1 arcsec/s, включая тесты на смещение нуля, чувствительность при постоянной скорости и ошибку несоосности. Акселерометры проверяются на центрифуге при ускорениях до ±50g для определения коэффициентов масштабирования в условиях высоких перегрузок. В испытаниях типа «Hardware in the Loop» моделируются полные сценарии миссии (запуск, крейсер, наведение на цель), а выход INS сравнивается с данными симулятора. Роль системы — обеспечение точности определения координат и ориентации с погрешностью не более нескольких метров
вплоть до попадания, даже в условиях отсутствия GPS и активных помех.
управление вектором тяги или рулями (TVC / Canard Actuation)
Включает бесщёточные электроприводы или
гидроприводы с датчиками положения (оптические или потенциометрические энкодеры), высокомощные контроллеры и механизмы передачи усилия. Тестирование проводится на стенде моделирования динамики полёта с профилями ввода, предполагающими быстрые изменения угла рулей менее чем за 0,1 с. Оцениваются скорость и точность реакции, защита от перегрузок и способность точно выполнять корректирующие команды от INS.

головка самонаведения (Seeker Head)
Содержит инфракрасные (IR) или миллиметровые радиолокационные сенсоры высокого разрешения, механизмы сканирования или поворота зеркал, а также цифровой блок обработки сигнала с алгоритмами распознавания и сопровождения цели. Испытывается на двухосных или 6 DOF стендах с диапазоном поворота ±90° и скоростью до 200°/с совместно с генератором сцены цели. Испытания позволяют оценить время реакции, способность удерживать захват при вибрациях и манёврах, а также устойчивость к ложным целям.

взрыватель и датчики ускорения/удара
Состоит из пьезоэлектрических или MEMS
акселерометров с очень малым временем отклика, схем обнаружения и блока срабатывания боевой части. Испытывается на ударных стендах, вибростендах и в центрифуге при кратковременных перегрузках до 100g. Обеспечивает срабатывание боевой части только в строго определённых условиях столкновения или перегрузки.
Умные ракеты


стабилизация вооружения (Weapon Stabilization System)
Состоит из военных ИМУ с высокочувствительными MEMS гироскопами, высокоточных акселерометров, лазерных энкодеров углового положения башни и контроллера стабилизации. Испытывается на мощных двух или трёхосных стендах с инерционным макетом орудия, что позволяет смоделировать вибрацию, кручение и резкие ускорения. Оценивается способность удерживать отклонение линии прицеливания менее 0,1 мрад при интенсивных движениях.

наземная инерциальная навигация (Land Based INS)
Включает тактический ИМУ с высокоточными
гироскопами и акселерометрами, вспомогательным GPS и процессором слияния данных. Испытывается на трёхосном стенде и в центрифуге для оценки дрейфа и отношения сигнал/шум. Обеспечивает точную навигацию
в условиях без GPS (туннели, плотная застройка).
управление башней (Turret Control System)
Состоит из приводных электродвигателей, датчиков положения и цифрового контроллера, тестируемых на стенде с профилями движения по пересечённой местности. Проверяется плавное и точное сопровождение цели без перерегулирования.
Танки и бронетранспортёры
