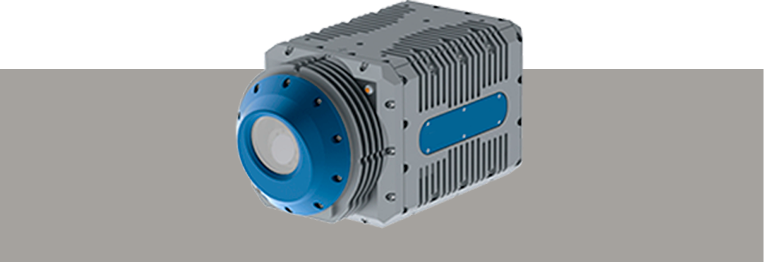
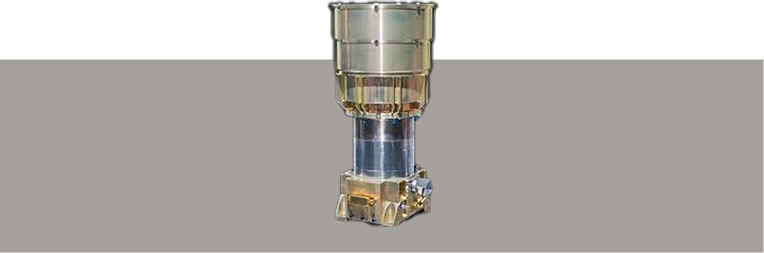
Звёздный датчик (Star Tracker)
Система включает высокоточный оптический блок, ПЗС или КМОП сенсор, устойчивый к радиации, процессор изображений с алгоритмами сопоставления со звёздным каталогом и высокоскоростные интерфейсы передачи
данных. Двух- или трёхосевой скоростной стол в сочетании с имитатором звёздного поля применяется для воспроизведения углового движения и изменения положения опорных небесных объектов. Это позволяет выявить и компенсировать ошибки смещения, офсета и оптических искажений. Откалиброванные данные датчика напрямую используются в системе управления ориентацией и орбитой (AOCS) для поддержания точной
юстировки антенн, солнечных панелей и научной аппаратуры.
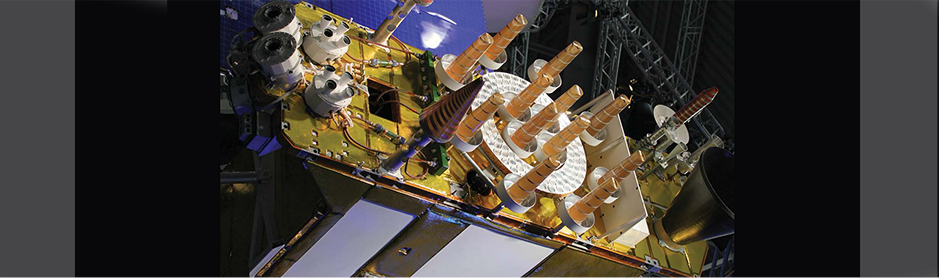
Солнечный датчик (Sun Sensor)
В состав входят входная оптика (коллиматор пинхол или прецизионная линза), массив фотодиодов или ПЗС матрица позиционирования (PSD), блок обработки сигналов и система термостабилизации. Скоростной стол и источник света симулятор Солнца позволяют испытывать и калибровать датчик при различных углах и условиях освещённости. Высокоточные данные солнечного датчика являются основным источником ориентации спутника относительно Солнца, критично важным для энергоменеджмента, стабилизации и начальной инициализации навигации.
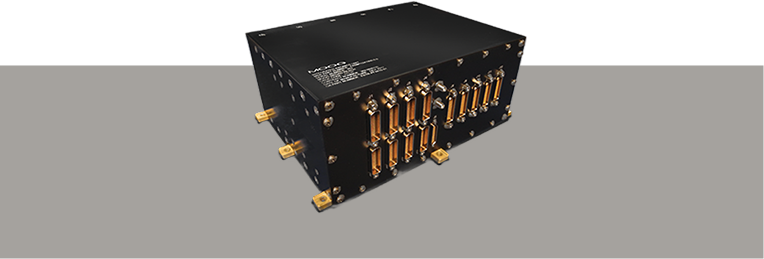
Космический ИНС модуль (Space Grade IMU)
Включает гироскопы HRG или FOG, высокоточные акселерометры, устойчивые к радиации, модуль термостабилизации и процессор слияния данных. Испытания проводятся на трёхосевом скоростном столе в термокамере для оценки смещений, коэффициентов масштаба и перекрёстной чувствительности. Откалиброванные данные IMU – основной вход для расчетов навигации и основа для интеграции с GPS или оптическими датчиками.
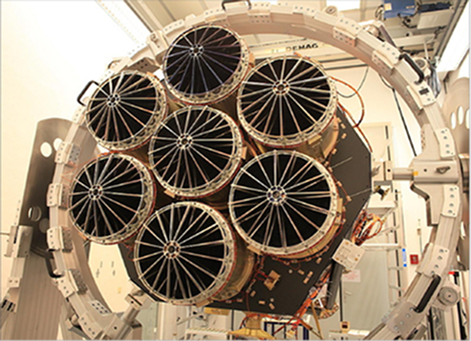
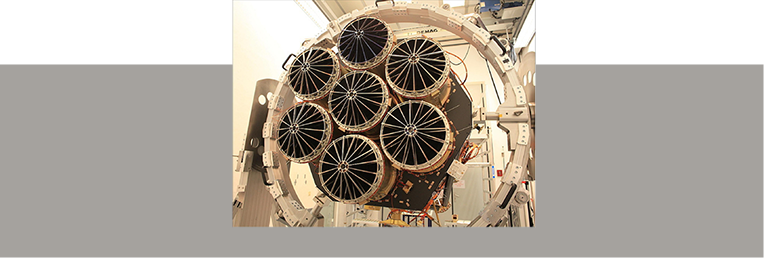
Реакционный маховик (Reaction Wheel)
Состоит из сбалансированного ротора, сверхточных подшипников, электродвигателя BLDC, датчика скорости
и контроллера. Скоростной стол используется для определения создаваемого крутящего момента и уровня вибраций. Такие испытания критичны для миссий, требующих сверхточных изменений ориентации.
Космический магнитометр (Space
Magnetometer)
Модули используются для разработки автономных функций и алгоритмов построения маршрута в роботах. В их состав входят высокоточные IMU, энкодеры, GPS/RFID или LiDAR. Проверка осуществляется на платформах с 6 степенями свободы или трёхосевых стендах с произвольными/динамическими профилями движения, что позволяет оценивать поведение алгоритмов навигации в условиях сложной динамики. Данные применяются для улучшения законов управления и алгоритмов обхода препятствий.
Высокоточный гироскоп (Spaceborne
Precision Gyroscope)
Основной чувствительный элемент – HRG/FOG/RLG с механическим стабилизатором и термокомпенсацией. Высокоточный трёхосевой стол позволяет измерить долгосрочный дрейф и линейность. Необходим для многолетних миссий с автономной навигацией.
Астрономический навигационный датчик
(Celestial Navigation Sensor)
Включает астрономическую оптику, сверхчувствительный детектор, процессор для сопоставления с каталогом и высокоскоростной интерфейс передачи данных. Скоростной стол в связке с симулятором движения небесных тел воспроизводит сценарии дальнего космоса для проверки точности
длительной ориентации.
Танки и бронетранспортёры