Динамическая точность норировочных столов: анализ ошибок скорости, полоса пропускания и архитектура контроллера
Ошибка угловой скорости является одним из важнейших параметров динамической точности и играет ключевую роль в таких областях, как испытания, калибровка и моделирование движения гироскопов в инерциальных навигационных системах, аппаратно‑программное моделирование (HWIL), а также при испытаниях линейного ускорения и центрифугировании.
Погрешность угловой скорости
Ошибка угловой скорости является одним из важнейших параметров динамической точности и играет ключевую роль в таких областях, как испытания, калибровка и моделирование движения гироскопов в инерциальных навигационных системах, аппаратно‑программное моделирование (HWIL), а также при испытаниях линейного ускорения и центрифугировании. В процессе калибровки среднее значение угловой скорости измеряется на интервалах 1°, 10° и 360°, причём именно это значение используется в качестве основного критерия оценки точности и стабильности угловой скорости. Точность угловой скорости определяется как максимальное отношение разности между измеренной скоростью и заданным значением, а стабильность — на основе разброса данных. Оба этих показателя являются безразмерными и выражаются в процентах или в долях на миллион (ppm).

Средняя скорость измеряется с помощью точных изолированных счётчиков — внешних, получающих настраиваемые импульсы TTL от стола, или встроенных, подключённых к ПК для записи и анализа данных в ПО наподобие MATLAB. На точность скорости влияют время выборки и пульсации момента (cogging torque). Уменьшение времени выборки повышает точность расчёта мгновенных положений и скоростей; каскадная архитектура контуров и высокая скорость их работы также важны. Пульсации момента, вызванные магнитным взаимодействием ротора и статора, уменьшаются при увеличении числа полюсов, оптимизации обмоток и косом расположении полюсов ротора; влияние также снижается при высоких скоростях и больших моментах инерции нагрузки.



Выбор двигателя
Выбор двигателя требует знания динамических уравнений стола, характеристик «момент–ток» и «момент–скорость» двигателя, а также сценария движения заказчика. Задание углового положения, скорости и ускорения на вход уравнений даёт три составляющие момента для каждой оси: одну вдоль оси вращения и две, создающие динамическую нагрузку на подшипники. Эти моменты преобразуются в токи для расчёта допустимого времени протекания, причём максимальный момент и длительность тока определяют выбор двигателя. Каталожные значения ускорений обычно указываются для холостого режима и без учёта взаимодействий.

Полоса пропускания
Полоса пропускания — ещё один параметр динамической точности, характеризующий способность системы отслеживать синусоидальные команды. На основании построения диаграмм Боде в диапазонах различных амплитуд и широкого спектра частот полоса определяется как минимальная частота, при которой амплитуда падает на -3 дБ или фазовый сдвиг достигает 90°. Влияние оказывают собственная частота и демпфирование конструкции (материалы, геометрия, соединения, фундамент), соотношение моментов инерции, фильтры управления, время выборки, максимальный ток двигателя и проектирование путей feedforward. В проектной и испытательной фазах проводится модальный анализ для выявления и устранения резонансов.

Возмущения
Возмущения — изменения нагрузки, гироскопические эффекты, дисбаланс, а также изменение поведения при малых сигналах из-за трения ухудшают работу системы и компенсируются точным моделированием.

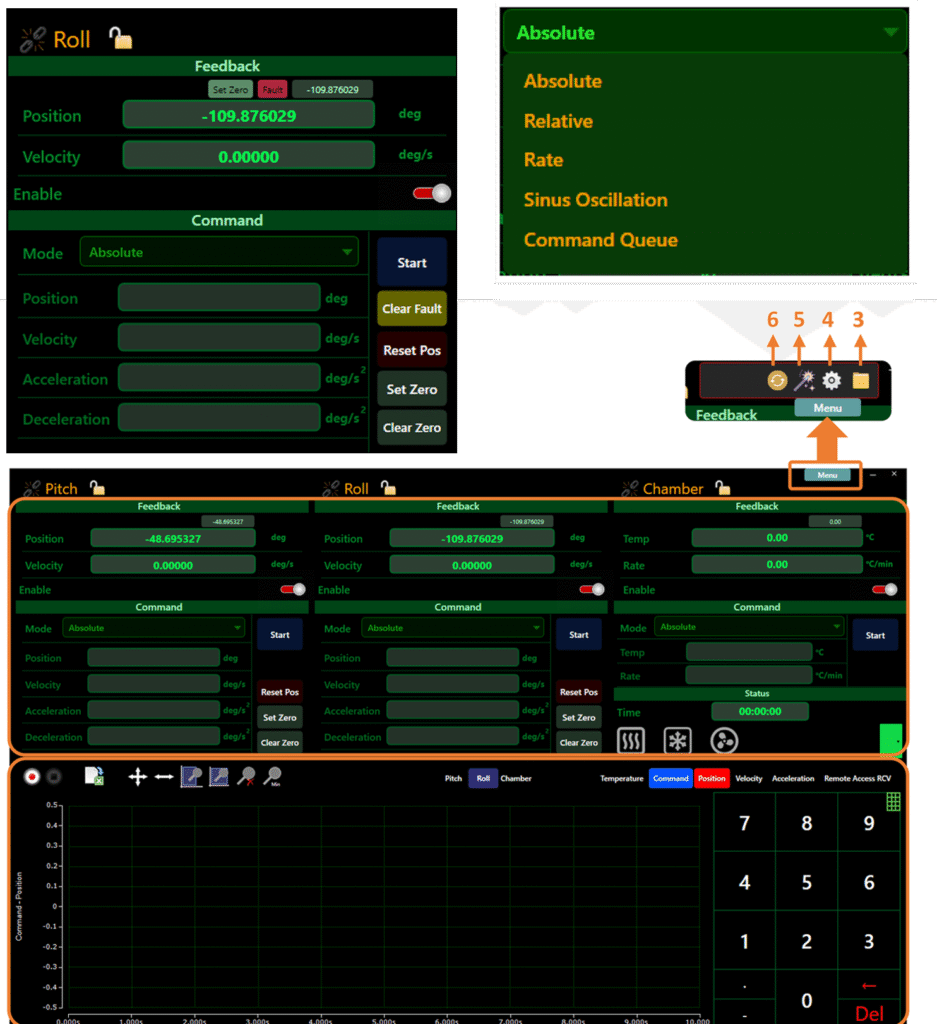
Контроллер и ПО
Контроллер и ПО поддерживают несколько режимов движения (абсолютное/инкрементальное позиционирование и задание скорости, синусоидальные команды, очередь команд для сценариев калибровки в Excel, удалённый доступ через интерфейс RS-232 до 1 кГц или UDP до 4 кГц). Внешний контур управления замыкается менее чем за 250 мкс, а выполнение команды (прямой путь) занимает менее 500 мкс. Многоуровневые защитные контуры предотвращают неустойчивость, превышение скорости/ускорения, чрезмерный ток и перегрев, а также обеспечивают диагностику и устранение неисправностей. Настройки ПО позволяют задать допустимую ошибку по положению и ограничения на макс. скорость, ускорение, время тока и температуру.